 Español
Español Deutsch
Deutsch Русский
Русский English
English








PRINCIPIO DEL REDUCTOR DE ENGRANAJES ARMÓNICOS
El impulso armónico fue inventado por el inventor estadounidense C. Walt Musser a mediados de la década de 1950.
1. Composición de la caja de cambios armónica
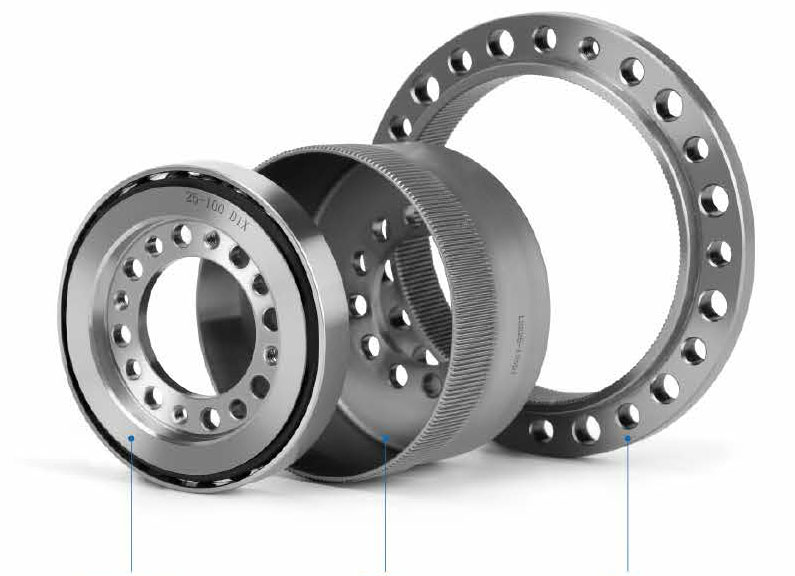
La caja de cambios armónica tiene tres componentes básicos: un generador de ondas, un spline flexible y un spline circular.
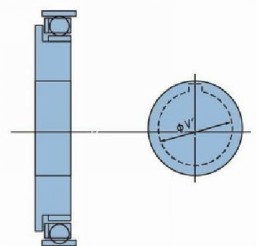
Generador de olas: está formado por un rodamiento de bolas y una leva elíptica. El generador de olas suele ir acoplado al extremo de entrada, el aro interior del rodamiento se fija alrededor de la leva provocando la El aro exterior del rodamiento se deforma hasta adoptar una forma elíptica.
Estriado flexible: es un componente elástico de paredes delgadas con dientes de engranaje en la superficie exterior. Generalmente se instala en el extremo de salida.
Estriado circular: es un anillo rígido de acero con dientes internos. Por lo general, tiene dos dientes más que la ranura flexible y generalmente está montado en una carcasa.
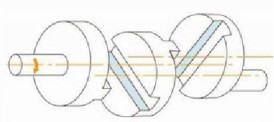
2. Principio de la caja de cambios armónica
Como reductor, la caja de cambios armónica suele estar en un estado como el siguiente: el generador de ondas impulsa, la ranura circular está fija y la ranura flexible es el extremo de salida.
Cuando el generador de ondas se coloca dentro de la ranura flexible, ésta se fuerza a adoptar una forma elíptica, lo que hace que los dientes de la ranura flexible se enganchen con el perfil del diente de la ranura circular a lo largo del eje mayor de la elipse, con los dientes completamente desconectado a lo largo del eje menor de la elipse.
La rotación del generador de ondas hace que la ranura flexible se deforme continuamente, los dientes cambian de estado operativo en el proceso de acoplamiento y desacoplamiento, por lo que se realiza la transmisión de movimiento entre el generador de ondas y la ranura flexible
3. Características de la caja de cambios armónica
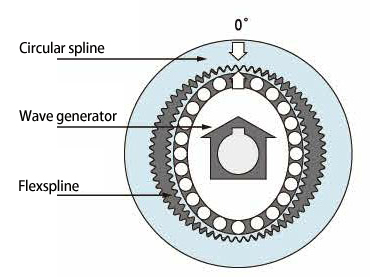 El generador de ondas fuerza la ranura flexible a una forma elíptica, lo que hace que los dientes de la ranura flexible se enganchen con el perfil del diente de la ranura circular a lo largo del eje principal de la elipse, con los dientes completamente desenganchados a lo largo de la Eje menor de la elipse.
El generador de ondas fuerza la ranura flexible a una forma elíptica, lo que hace que los dientes de la ranura flexible se enganchen con el perfil del diente de la ranura circular a lo largo del eje principal de la elipse, con los dientes completamente desenganchados a lo largo de la Eje menor de la elipse.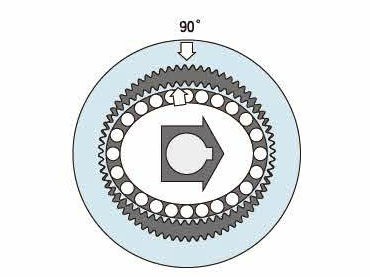 A medida que el generador de ondas gira en el sentido de las agujas del reloj con la ranura circular fija, la ranura flexible se somete a una deformación elástica y la posición de enganche de sus dientes se mueve girando en relación con la ranura circular.
A medida que el generador de ondas gira en el sentido de las agujas del reloj con la ranura circular fija, la ranura flexible se somete a una deformación elástica y la posición de enganche de sus dientes se mueve girando en relación con la ranura circular.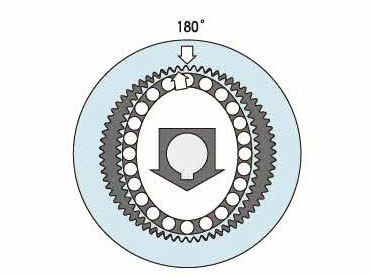 A medida que el generador de ondas gira 180 grados en el muelle, la ranura flexible se mueve en sentido contrario a las agujas del reloj un diente en relación con la ranura circular.
A medida que el generador de ondas gira 180 grados en el muelle, la ranura flexible se mueve en sentido contrario a las agujas del reloj un diente en relación con la ranura circular.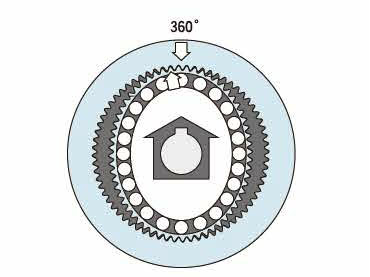 Por cada rotación completa en el sentido de las agujas del reloj (360 grados) del generador de ondas, la ranura flexible se mueve en sentido contrario a las agujas del reloj dos dientes en relación con la ranura circular porque la ranura flexible tiene dos dientes menos que allí. están en la spline circular. en general, este movimiento se trata como ejecución de salida.
Por cada rotación completa en el sentido de las agujas del reloj (360 grados) del generador de ondas, la ranura flexible se mueve en sentido contrario a las agujas del reloj dos dientes en relación con la ranura circular porque la ranura flexible tiene dos dientes menos que allí. están en la spline circular. en general, este movimiento se trata como ejecución de salida.Progreso de malla diente a diente
- La capacidad del dentado del engranaje aumentó un 15 %
- El aumento de temperatura disminuyó entre 8 y 10 grados
- Reducción del área de contacto con picaduras por fatiga del engranaje
- El tiempo de servicio superó las 15.000 horas
Acerca del perfil de diente WS
Hemos realizado algunas mejoras basadas en el perfil teórico tradicional de doble arco. El perfil del diente formado por la curva de arco continuo de dos curvas originales se optimiza como una curva de arco continuo con múltiples segmentos de curvatura. Para garantizar que los engranajes del reductor estén engranados correctamente, al mismo tiempo que se protege el riesgo de falla de la grasa después de exprimirla al reducir la fricción de deslizamiento relativa.
Basado en δ forma del diente, la capacidad de carga aumenta en un 15%, el aumento de temperatura se reduce entre 8 y 10 grados, el área de contacto de picaduras por fatiga del engranaje se reduce en más del 30%, el funcionamiento continuo y la vida útil superan las 15000 horas, lo que mejora la Rendimiento general de la caja de cambios armónica.
Durante el desarrollo, la formación del perfil del diente blando puede determinarse mediante el desplazamiento radial del generador. Se pueden equipar diferentes relaciones de reducción de engranajes con varios perfiles de dientes y el juego de la malla se puede ajustar cómodamente según las condiciones reales. Mantenga la caja de cambios en las mejores condiciones de funcionamiento.
Acerca del reductor armónico Fubao
Dongquan Fubao Motor Technology Co., Ltd, es una empresa especializada dedicada a la investigación y el desarrollo de cajas de cambios armónicas de alta precisión. La empresa cuenta con 30.000 metros cuadrados de planta estándar, utiliza los mejores equipos de producción e inspección del mundo y cuenta con un estricto control de calidad en todos los aspectos, desde las materias primas hasta los productos terminados, para garantizar la calidad de los productos.
Desarrollo completamente independiente, el departamento de I+D de la empresa. El centro D ha sido identificado como el centro provincial de R& D centro de empresas de alta tecnología. En el campo de la transmisión armónica, cuenta con varias patentes de invención nacionales y patentes de modelos de utilidad nacionales.
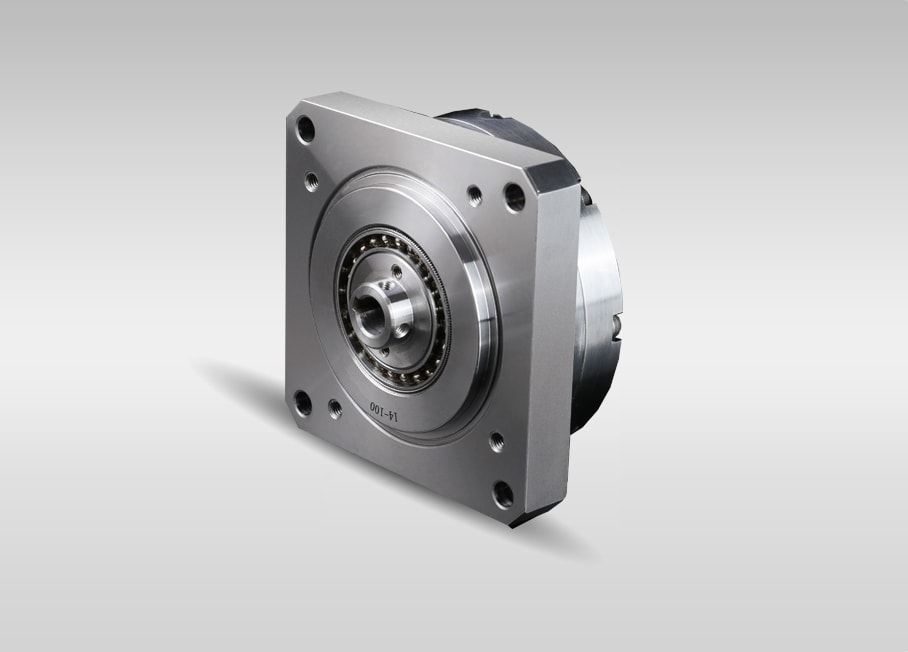
La caja de cambios armónica de precisión desarrollada y producida por nuestra empresa tiene las características de alta confiabilidad, alta precisión, alto torque, larga vida útil, gran relación de velocidad, pequeño volumen, etc. Los productos se utilizan ampliamente en los campos de robots, equipos aeroespaciales, máquinas herramienta CNC, equipos de fabricación de semiconductores, control de automatización de maquinaria de precisión, etc., y estamos comprometidos a cambiar el patrón de automatización mundial.
| Series | Type | Reduction ratio(Note 1) | Structure Code | Style | |||||
|---|---|---|---|---|---|---|---|---|---|
| WSS WSN WSG WSD WFS |
11 | 50 | 80 | 100 | null | U: Completely unit C: Component |
I: Simple Standard Type II: Simple Cross Slider Type |
Blank: Standard M: Compact Mini |
|
| 14 | 50 | 80 | 100 | 120 | |||||
| 17 | 50 | 80 | 100 | 120 | |||||
| 20 | 50 | 80 | 100 | 120 | 160 | ||||
| 25 | 50 | 80 | 100 | 120 | |||||
| 32 | 50 | 80 | 100 | 120 | |||||
| 40 | 50 | 80 | 100 | 120 | |||||
Descripción del tamaño del anillo de sellado
| Series | Model | Circular spline | flex spline | ||
|---|---|---|---|---|---|
| Seal ring size | Slot size | Seal ring size | Slot size | ||
| WHT-I WUT-L |
14 | 36.5*0.6 | φ36.5 0 -0.1 * φ38 +0.1 0 * 0.45 +0.1 0 | 53*1.5 | φ53 0 -0.1 * φ56.8 +0.1 0 * 1.15 +0.1 0 |
| 17 | 45*1 | φ45.5 0 -0.1 * φ48 +0.1 + * 0.75 +0.1 0 | 64*1 | φ64 0 -0.1 * φ66.6 +0.1 + * 0.75 +0.1 + | |
| 20 | 54*1 | φ53.8 0 -0.1 * φ56.2 +0.1 + * 0.75 +0.1 + | 73*1.5 | φ73 0 -0.1 * φ76.8 +0.1 + * 1.15 +0.1 + | |
| 25 | 68*1 | φ68 0 -0.1 * φ70.6 +0.1 + * 0.75 +0.1 + | 90*1.5 | φ90 0 -0.1 * φ94.2 +0.1 + * 1.15 +0.1 + | |
| 32 | 88*1.5 | φ88 0 -0.1 * φ92 +0.1 + * 1.15 +0.1 + | 119*1.5 | φ119 0 -0.1 * φ123.1 +0.1 + * 1.15 +0.1 + | |
| 40 | 108*1.75 | φ108 0 -0.1 * φ113 +0.1 + * 1.5 +0.1 + | 143*2 | φ142.6 0 -0.1 * φ148 +0.1 + * 1.5 +0.1 + | |
Términos y definiciones
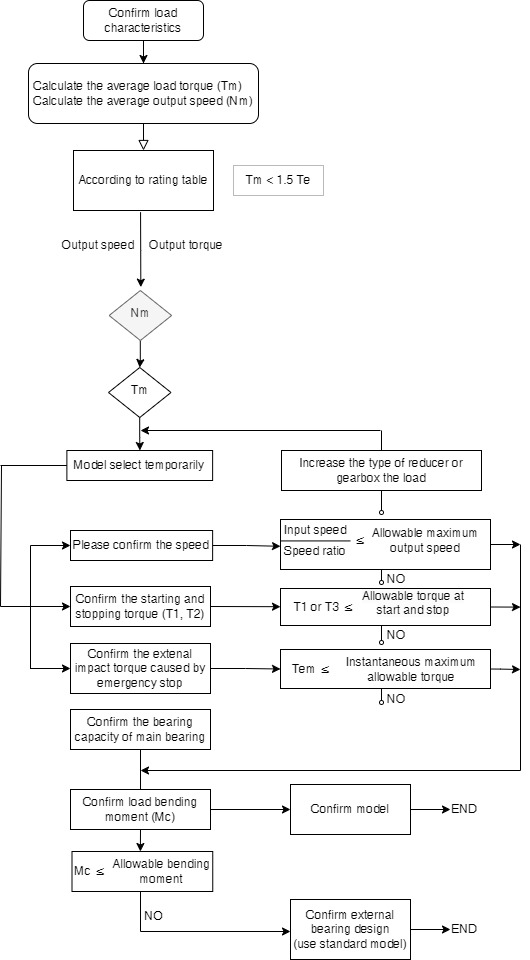
Par de arranque: Es el valor mínimo de par aplicado en el extremo de entrada en el que la caja armónica comienza a girar por primera vez sin carga.
Contragolpe: el espacio libre entre el perfil de diente estriado flexible y el perfil de diente estriado circular.
Par nominal: Indica el par de salida continuo permitido a la velocidad nominal de entrada.
Par máximo admisible en arranque y parada: Es el par máximo como resultado del momento de inercia de la carga de salida durante la aceleración y desaceleración.
Valor máximo permitido para el par de carga promedio: Es el par máximo cuando la caja de cambios armónicos se mantiene en funcionamiento continuo.
Par momentáneo máximo admisible: Es el par máximo momentáneo al que puede verse sometida la caja de cambios armónica en caso de colisión o parada de emergencia.
Velocidad de rotación de entrada máxima permitida: No exceda la clasificación permitida.
Velocidad de rotación de entrada promedio permitida: Es el valor promedio de la velocidad de entrada.
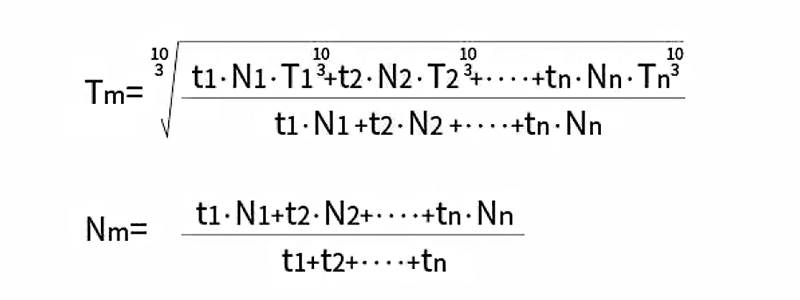
| At startup (MAX) |
When stable | When stopped (MAX) |
When emergency stop impact |
|
|---|---|---|---|---|
| Load torque (Nm) |
T1 | T2 | T3 | Tem |
| Speed (r/min) |
N1 | N2 | N3 | Nem |
| Time (sec) |
t1 | t2 | t3 | tem |
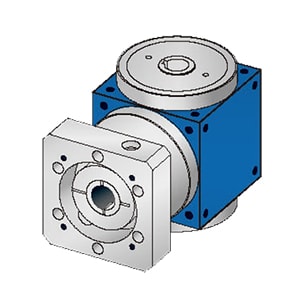
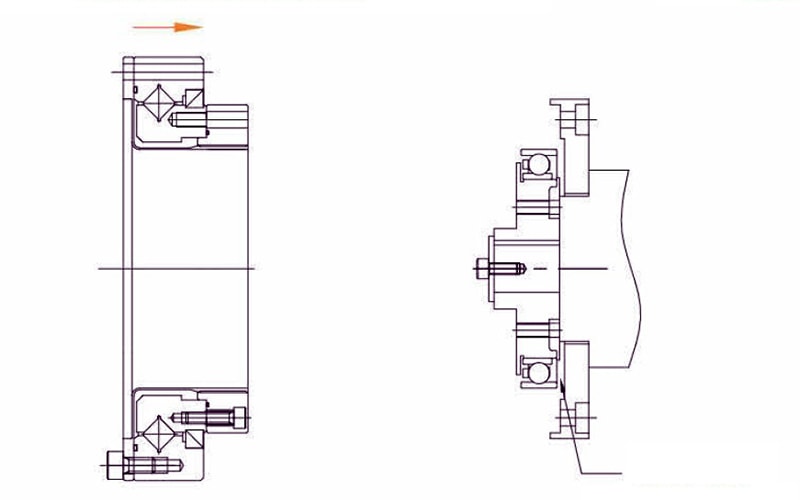
El generador de olas incluye una estructura de acoplamiento estilo europeo con estructura autoalineante y un tipo integrado sin estructura autoalineante automática, y varía según la serie. Para obtener más información, consulte el esquema de cada serie.
La estructura básica y la forma del generador de olas se muestran a continuación
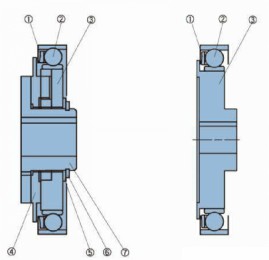
Estructura del tipo de bloque deslizante transversal que utiliza una estructura de acoplamiento europea
- Soporte de rodamiento flexible
- Desnudo flexible
- Generador de olas
- Bloque deslizante cruzado
- Junta
- Anillo-escudo
- Eje de entrada de potencia
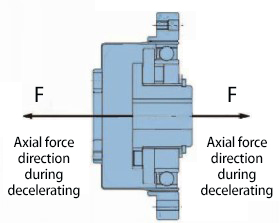
Fuerza axial y fijación axial del generador de olas
La fuerza axial sobre el generador de ondas comienza a actuar debido a la deformación elástica de la ranura flexible.
Cuando se utiliza como reductor. la fuerza axial se mueve hacia el interior de la ranura flexible.
Cuando se utiliza como aumentador de velocidad, el movimiento de las fuerzas axiales es opuesto a la dirección de desaceleración.
El diseño de prevención de fuerza axialLa e del generador de olas se adoptará bajo cualquier condición de uso.
Tamaño máximo de apertura del generador de ondas unibody
La apertura estándar del generador de ondas se muestra en el dibujo del contorno, la modificación puede ser
fabricado dentro del rango de tamaño máximo que se muestra en la tabla.
Sugerimos utilizar el estándar GB para el tamaño del chavetero. La dimensión de longitud efectiva de la llave debe diseñarse para soportar completamente el valor del par transmitido.
| Model | 11 | 14 | 17 | 20 | 25 | 32 | 40 |
|---|---|---|---|---|---|---|---|
| Standards size (H7) | 5 | 6 | 8 | 9 | 11 | 14 | 14 |
| Minimum size | - | 3 | 4 | 5 | 6 | 6 | 10 |
| Maximum size | - | 8 | 10 | 13 | 15 | 15 | 20 |
Procedimiento de instalación
Instalación de la serie WSS
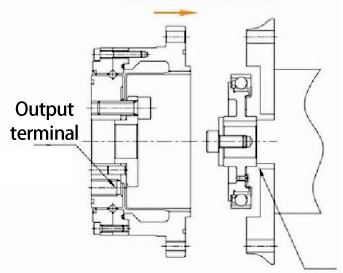
El primer método de instalación del reductor serie WHT-I/II
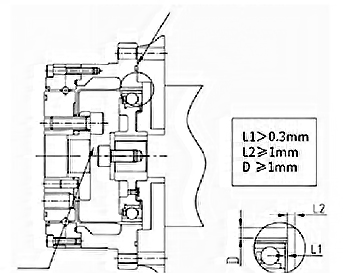
El segundo método de instalación para el reductor serie WHT-I/II
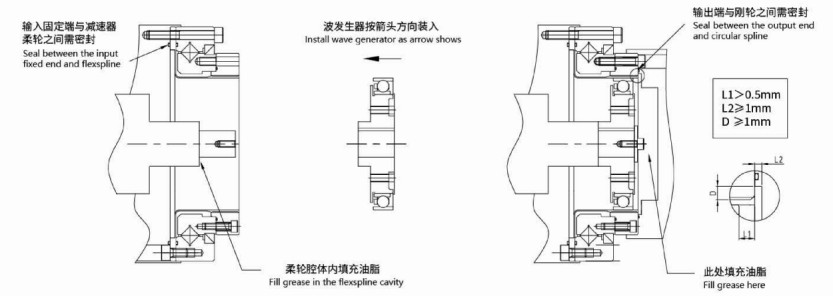
 Llene de grasa aquí< /i>
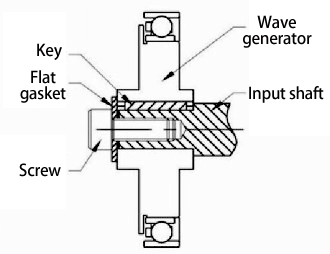
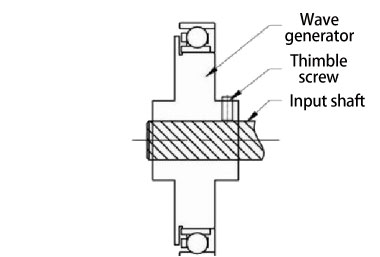
Llene de grasa aquí< /i>El método de conexión y fijación del generador de olas
1. El eje de entrada tiene un hombro de eje, se puede conectar directamente con el generador de olas. Como se muestra en la figura.
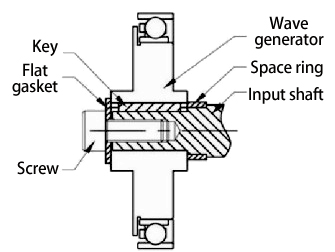
2. El eje de entrada tiene un resalte, pero es demasiado largo. Puede agregar un anillo espacial en el eje (el paralelismo del anillo espacial debe estar dentro de 0,01 mm), luego conecte y fije el generador de ondas. Como se muestra en la figura.
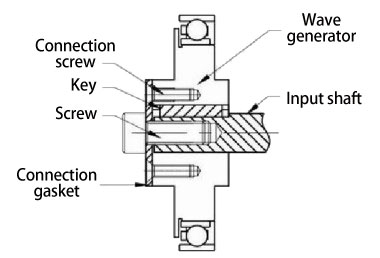
3. El eje de entrada no tiene hombro de eje. Fije una junta de conexión en el generador de olas, luego conéctela y fíjela con el eje de entrada. Como se muestra en la figura.
4. El método de fijación es adecuado para modelos pequeños, entrada de eje óptico. El eje de entrada se inserta en el generador de olas, luego conéctelo y fíjelo a través del tornillo del dedal en el generador de olas. Como se muestra en la figura re.
Consideraciones de montaje
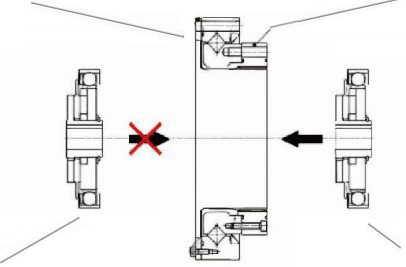
Procedimiento de montaje
Instala la ranura circular y la ranura flexible en el dispositivo y luego instala el generador de ondas. De lo contrario, podría causar daños al relleno de los dientes del engranaje o un engrane excéntrico inadecuado del engranaje. Por favor, preste mucha atención.
Precaución con el generador de olas
1. Evite aplicar fuerza indebida sobre el rodamiento del generador de olas durante el montaje. Sugerimos rotar el generador de ondas mientras lo inserta, esto facilitará el proceso.
2. Si el generador de olas no tiene un acoplamiento Oldham, se debe tener especial cuidado para garantizar que la concentricidad y la inclinación estén dentro de los límites especificados.
Precauciones con spline circular
1. Las superficies de montaje deben tener una planicidad, suavidad y ausencia de distorsiones adecuadas.
2. Especialmente en la zona de los orificios para tornillos no debe haber rebabas ni materias extrañas.
3. Asegúrese de realizar el mecanizado de biselado y evitación en el conjunto de la carcasa para evitar interferencias con la ranura circular.
4. La ranura circular debe poder girar dentro de la carcasa. Asegúrese de que no haya interferencias y que no se enganche en nada.
5. Al montar el perno, asegúrese de que el orificio del perno sea correcto y esté alineado. Los pernos deben girar libremente al apretarlos y no deben tener ninguna irregularidad debido a que el orificio del perno esté desalineado u oblicuo.
6. No apriete los pernos con el par especificado todos a la vez. Apriete los pernos temporalmente con aproximadamente la mitad del par especificado y luego apriételos con el par especificado. Apriétalos en un patrón uniforme y entrecruzado.
7. Evite fijar la ranura circular si es posible, ya que puede reducir la precisión de rotación y la suavidad del funcionamiento.
Precauciones sobre flex spline
1. Las superficies de montaje deben tener una planicidad, suavidad y ausencia de distorsiones adecuadas.
2. Especialmente en la zona de los orificios para tornillos no deben haber rebabas ni materias extrañas.
3. Asegúrese de realizar el mecanizado de biselado y evitación en el conjunto de la carcasa para evitar interferencias con la ranura circular.
4. Al montar el perno, asegúrese de que el orificio del perno sea correcto y esté alineado. Los tornillos de los pernos deben girar libremente al apretarlos y no deben tener ninguna irregularidad debido a que el orificio del perno esté desalineado u oblicuo.
5. No apriete los pernos con el par especificado todos a la vez. Apriete los pernos temporalmente con aproximadamente la mitad del par especificado y luego apriételos con el par especificado. Apriétalos en un patrón uniforme y entrecruzado.
6. Evite el engrane unilateral y la desviación al ensamblar con ranura circular.
Prevención de la oxidación
La unidad de ensamblaje completa no tiene prevención de oxidación en la superficie. Aplique antioxidante si es necesario. Además, si se necesita algún producto antioxidante, por favor contactar con el distribuidor autorizado.
Precisión de ensamblaje de la serie WSS
Para asegurarse de que la serie LSS tenga un rendimiento excelente al ensamblar, asegúrese de utilizar la siguiente precisión.
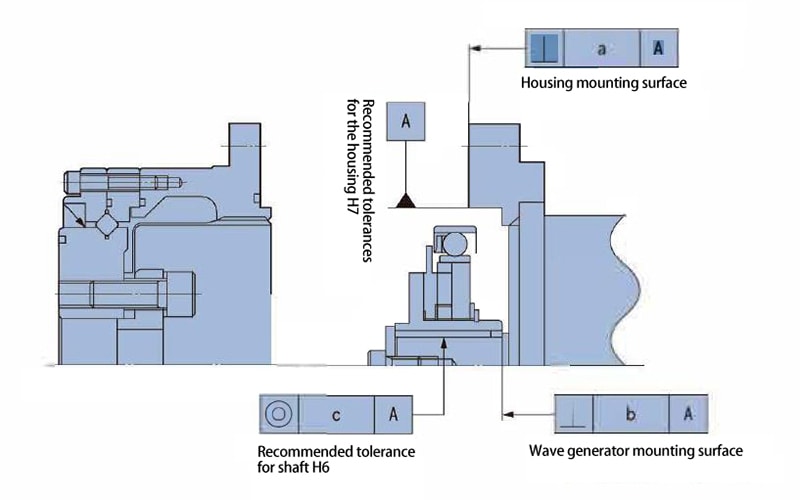
Precisión recomendada de la carcasa ensamblada
| Symbol / Model |
14 | 17 | 20 | 25 | 32 | 40 |
|---|---|---|---|---|---|---|
| a | 0.011 | 0.015 | 0.017 | 0.024 | 0.026 | 0..026 |
| b | 0.017 | 0.020 | 0.020 | 0.024 | 0.024 | 0.032 |
| (0.008) | (0.010) | (0.010) | (0.012) | (0.012) | (0.012) | |
| c | 0.030 | 0.034 | 0.044 | 0.047 | 0.050 | (0.050) |
| (0.016) | (0.018) | (0.019) | (0.022) | (0.022) | (0.024) |
Precisión de montaje de la serie WHT
Para asegurarse de que la serie LHT-I/I
Industria de aplicaciones
Adecuado para una amplia gama de aplicaciones
Robot cooperativo
Máquina multiarticular

Máquina de corte por láser
Máquina herramienta, Rectificadoras

MANIPULADOR PARALELO
Robots Scara, mano de araña...
ROBOT INDUSTRIAL
Manipulador, robot de eje, etc.

ROBOT HUMANOIDE
Robot biónico, robots andantes.
AGV CAE
Coche AGV para logística de almacén
HERRAMIENTA DE MÁQUINA
Máquina dobladora de tubos...
Máquina de tallado CNC
Tallado e impresión de dentaduras postizas.

ROBOTS EXTERNOS
rehabilitación de peso..
Fábricas de Fubao Mechanic Tech













Ahora la oferta