 Español
Español Deutsch
Deutsch Русский
Русский English
English



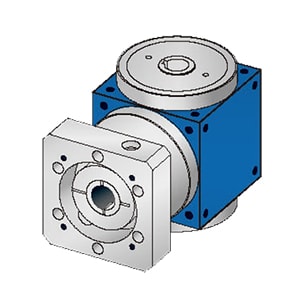








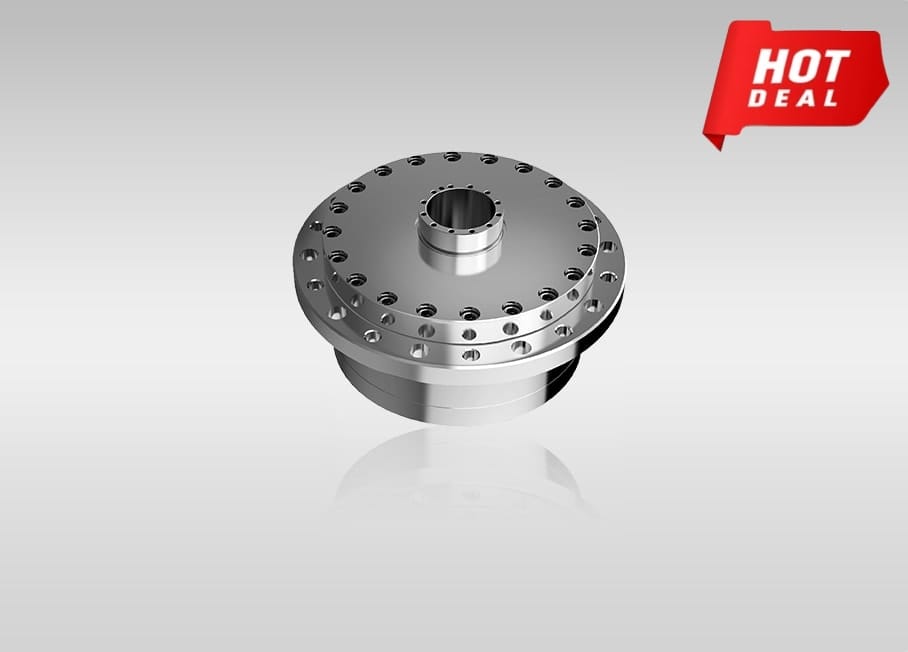
El diseño hueco de los reductores RV serie WRV-C proporciona:
1. Un gran diámetro de orificio hueco que permite un diseño flexible. El centro hueco facilita el enrutamiento de cables, tuberías y ejes que lo atraviesan, permite una mayor capacidad de cableado y permite alojar cables grandes en el interior. Esto evita la interferencia entre el cuerpo del robot y el equipo periférico, al tiempo que reduce las cargas de flexión y tracción.
2. Rodamientos de bolas de contacto angular incorporados que soportan cargas externas, proporcionan una alta rigidez a la flexión y permiten altos momentos de flexión permisibles, lo que mejora la confiabilidad.
3. Diseño de reducción en dos etapas:
La velocidad orbital más lenta del engranaje oscilante da como resultado una menor vibración. La conexión directa entre el motor y el engranaje de entrada reduce la inercia.
4. Estructura de soporte del portasatélites:
Alta rigidez torsional, baja vibración y fuerte resistencia a los golpes.
5. Contactos de rodamiento de rodillos:
Bajo par de arranque, bajo desgaste, larga vida útil y ajustado juego de engranajes arcmin.
6. Diseño de engranaje oscilante y engranaje estriado:
Juego apretado del engranaje y fuerte resistencia a los golpes.
El engrane simultáneo de múltiples dientes de engranajes oscilantes y estriados resiste eficazmente las cargas de impacto.
Parámetros de los reductores RV serie WRV-C
| Output speed(r/min) | 5 | 10 | 15 | 20 | 25 | 30 | 40 | 50 | 60 | Bending moment rigidity Nm/arc.min. (kgf-m/arc.min.) |
Allowable bending moment Nm(kgf-m) |
Instantaneous maximum allowable bending moment Nm(kgf-m) |
Allowable maximum output speed r/min |
Opening and stopping allowable moment Nm(kgf-m) |
Instantaneous maximum allowable torque Nm(kgf-m) |
Empty ride MAX. Arc.min. |
Torsional stiffness Nm/arc.min. (kgf-m/Arc.min.) |
Weight Kg |
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type | Reducer unit reduction ratio (R1) |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
Output Torque |
Input Power |
|||||||||
| Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | Nm (kgf-m) |
kW | |||||||||||
| WRV10C | 27 | 136 (13.9) |
0.09 | 111 (11.3) |
0.16 | 98 (10) |
0.21 | 90 (9.17) |
0.25 | 84 (8.58) |
0.29 | 80 (8.12) |
0.34 | 73 (7.45) |
0.41 | 68 (6.97) |
0.47 | 65 (6.60) |
0.54 | 421 (43) |
686 (70) |
1372 (140) |
80 | 245 (25) |
490 (50) |
1' | 47(4.8) | 4.6 |
| WRV27C | 36.57 (1390/38) |
368 (37.5) |
0.26 | 299 (30.5) |
0.42 | 265 (27) |
0.55 | 243 (24.8) |
0.68 | 227(23.2) | 0.79 | 215 (21.9) |
0.90 | 197 (20.1) |
1.10 | 184 (18.8) |
1.29 | 174 (17.8) |
1.46 | 1068 (109) |
980 (100) |
1960 (200) |
60 | 662 (67.5) |
1323 (135) |
1' | 147(15) | 8.5 |
| WRV50C | 32.54 (1985/61) |
681 (69.5) |
0.48 | 554 (56.5) |
0.77 | 490 (50) |
1.03 | 450 (45.9) |
1.26 | 420(42.9) | 1.47 | 398 (40.6) |
1.67 | 366(37.3) | 2.04 | 341(34.8) | 2.38 | 1960 (200) |
1764 (180) |
3528 (360) |
50 | 1225 (125) |
2450 (250) |
1' | 255(26) | 14.6 | ||
| WRV100C | 36.75 | 1362 (139) |
0.95 | 1107 (113) |
1.55 | 980 (100) |
2.05 | 899 (91.7) |
2.51 | 841 (85.8) |
2.94 | 796(81.2) | 3.33 | 730 (74.5) |
4.08 | 2813 (287) |
2450 (250) |
4900 (500) |
40 | 2450 (250) |
3430 (350) |
1' | 510(52) | 19.5 | ||||
| WRV120C | 36.75 | 1634 (166.8) |
1.14 | 1328 (135.6) |
1.85 | 1176 (120) |
2.46 | 1079 (110.1) |
3.00 | 1009 (103) |
3.51 | 955 (97.5) |
3.99 | 846(89.4) | 4.88 | 4263 (435) |
3920 (400) |
7840 (800) |
40 | 3675 (375) |
7350 (750) |
1' | 588(60) | 19.5 | ||||
| WRV200C | 34.86 (1499/43) |
2724 (278) |
1.90 | 2215 (226) |
3.09 | 1961 (200) |
4.11 | 1803 (184) |
5.04 | 1686 (172) |
5.88 | 1597 (163) |
6.69 | 9800 (1000) |
8820(900) | 17640 (1800) |
30 | 4900(500) | 9800 (1000) |
1' | 980 (100) |
55.6 | ||||||
| WRV320C | 35.61 (2778/78) |
4361 (445) |
3.04 | 3538 (361) |
4.94 | 3136 (320) |
6.57 | 2881 (294) |
8.05 | 2690 (275) |
9.41 | 12740 (1300) |
20580 (2100) |
39200 (4000) |
25 | 7840 (800) |
15680 (1600) |
1' | 1960 (200) |
79.5 | ||||||||
| WRV320CA | 210 | 4361 (445) |
3.04 | 3538 (361) |
4.94 | 3136 (320) |
6.57 | 2881 (294) |
8.05 | 2690 (275) |
9.41 | 12740 (1300) |
20580 (2100) |
39200 (4000) |
25 | 7840 (800) |
15680 (1600) |
1' | 1960 (200) |
92.1 | ||||||||
| WRV400C | 35.61 (2778/78) |
5449(556) | 3.79 | 4430 (452) |
6.17 | 3920 (400) |
8.19 | 3598 (367.2) |
10.02 | 17640 (180) |
26460 (2700) |
52920 (5400) |
20 | 9800 (1000) |
19600 (2000) |
1' | 2548 (260) |
106 | ||||||||||
| WRV500C | 37.34 (3099/83) |
6811 (695) |
4.75 | 5537 (56.5) |
7.73 | 4900 (500) |
10.26 | 4498 (459) |
12.56 | 24500 (2500) |
34300 (3500) |
78400 (8000) |
20 | 12250 (1250) |
24500 (2500) |
1' | 3430(350) | 154 | ||||||||||
Industria de aplicaciones
Adecuado para una amplia gama de aplicaciones
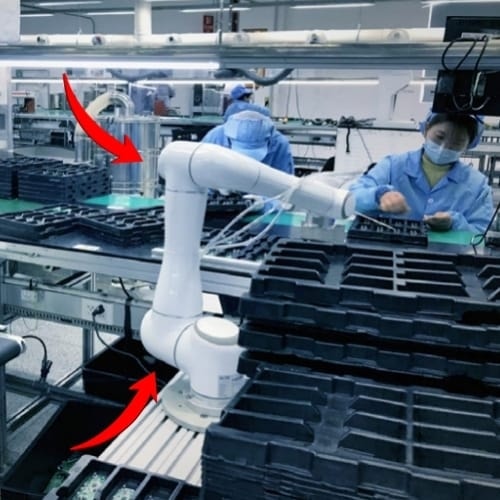
Robot cooperativo
Máquina multiarticular

Máquina de corte por láser
Máquina herramienta, Rectificadoras

MANIPULADOR PARALELO
Robots Scara, mano de araña...
ROBOT INDUSTRIAL
Manipulador, robot de eje, etc.

ROBOT HUMANOIDE
Robot biónico, robots andantes.
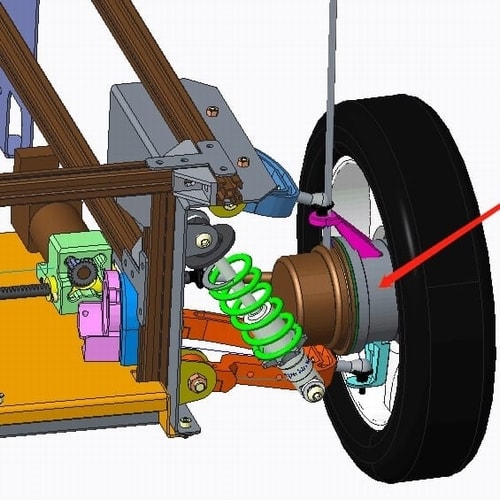
AGV CAE
Coche AGV para logística de almacén
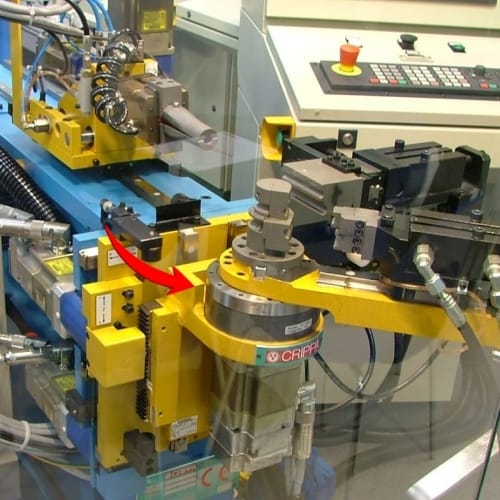
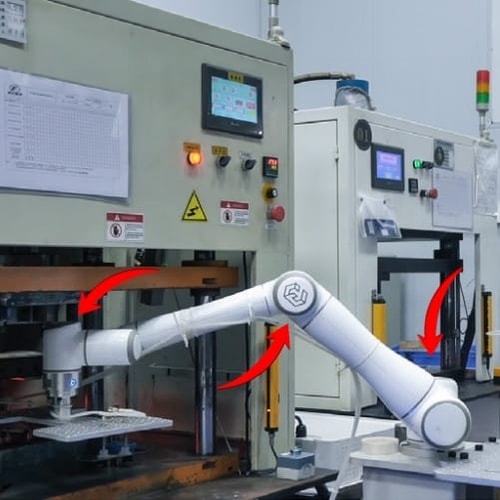
HERRAMIENTA DE MÁQUINA
Máquina dobladora de tubos...
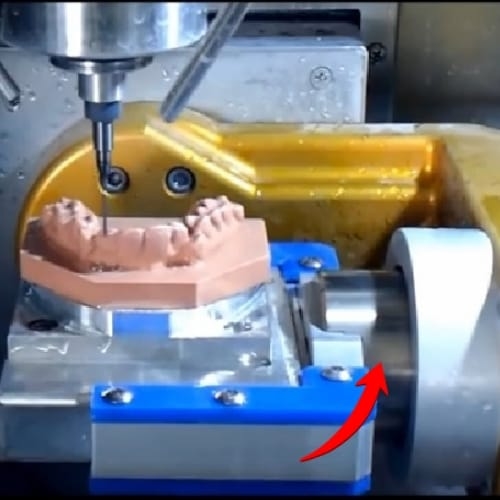
Máquina de tallado CNC
Tallado e impresión de dentaduras postizas.

ROBOTS EXTERNOS
rehabilitación de peso..
Fábricas de Fubao Mechanic Tech












Ahora la oferta