 Español
Español Deutsch
Deutsch Русский
Русский English
English












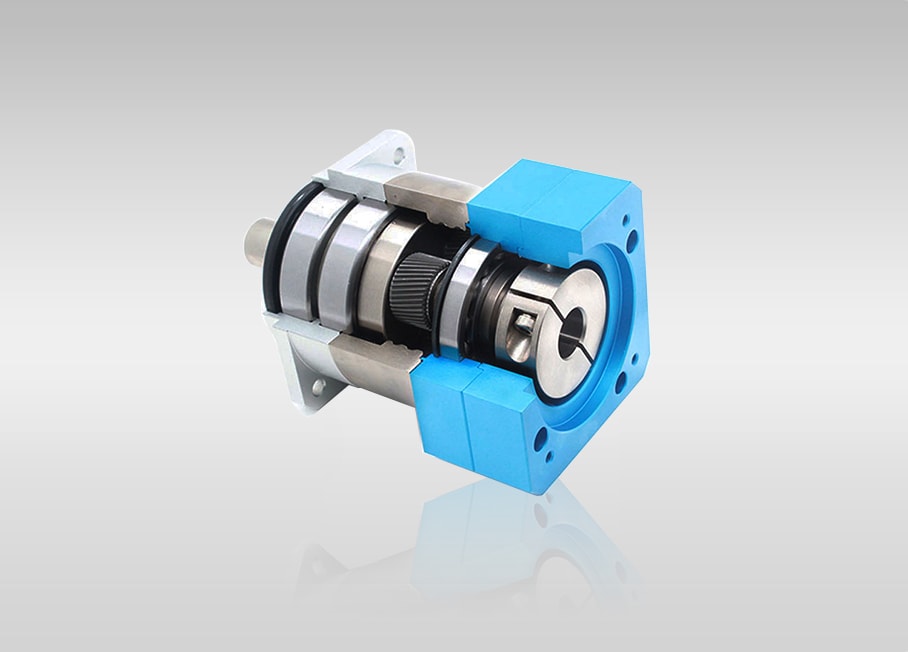
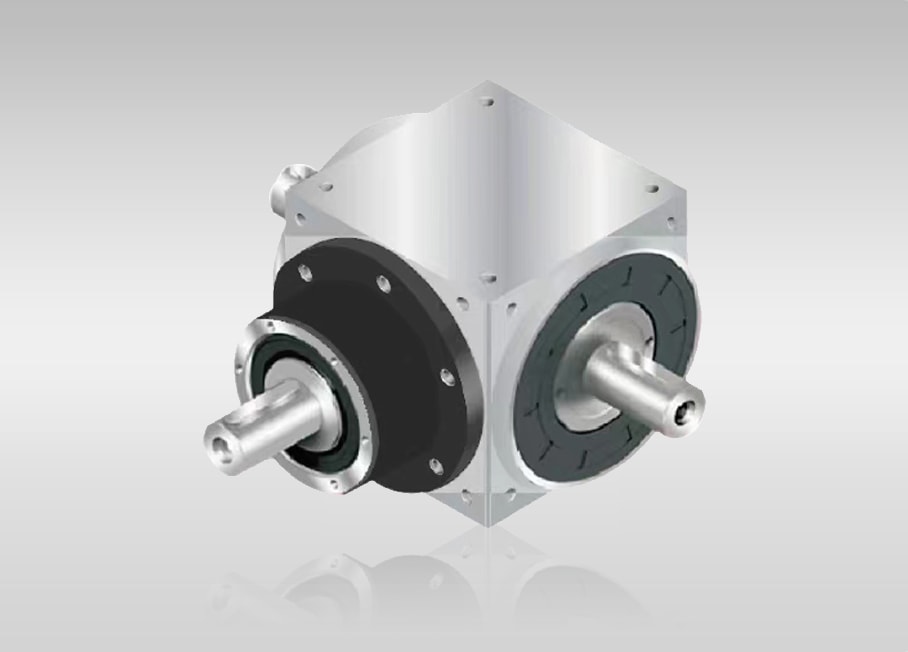
Características del reductor planetario recto serie WPGR
1. La caja de cambios externa está hecha de material 20CrMnT/20CrMo/SCM415 de alta calidad, cementación y enfriamiento controlados.
Su dureza superficial es tan alta como HRC60+2; la precisión de rodadura/pulido fino de la superficie del engranaje es de nivel JIS2;
Tiene características tales como funcionamiento estable, bajo nivel de ruido, alto par de carga y bajo juego;
2. La caja de engranajes interna se procesa mediante múltiples métodos de brochado o corte en espiral comúnmente utilizados en Japón y Taiwán, China;
3. Cuando el conjunto de caja de cambios planetaria esté en funcionamiento, estará en un estado de engrane completamente apretado, lo que reduce la situación de daño a la caja de cambios causado por colisión o engrane parcial.
Las características de un engrane completamente apretado hacen que la pérdida de eficiencia de cada transmisión de caja de cambios sea solo del 3%.
Este tipo de transmisión puede garantizar una alta eficiencia de transmisión cuando la energía cinética ingresa al reductor y luego al extremo mecánico, y evita la fricción causada por la caja de cambios interna, el deslizamiento, lo que resulta en una pérdida mecánica;
4. El diseño modular del eje de entrada del reductor es apto para cualquier fabricante y cualquier tipo de motor;
La brida de transición trasera del reductor está hecha de un material de aleación de magnesio y aluminio, que tiene una apariencia hermosa, peso ligero y buena disipación de calor después del tratamiento de la superficie;
5. Todos los modelos de reductor están equipados con sellos de aceite esqueleto para evitar fugas de aceite durante el funcionamiento a alta velocidad del reductor;
Las piezas estándar, como rodamientos y sellos de aceite, adoptan productos de marcas famosas nacionales e internacionales;
6. El eje está hecho de acero aleado y templado y revenido para cumplir con los requisitos de resistencia y tenacidad.
Dibujos del reductor planetario recto serie WPGR
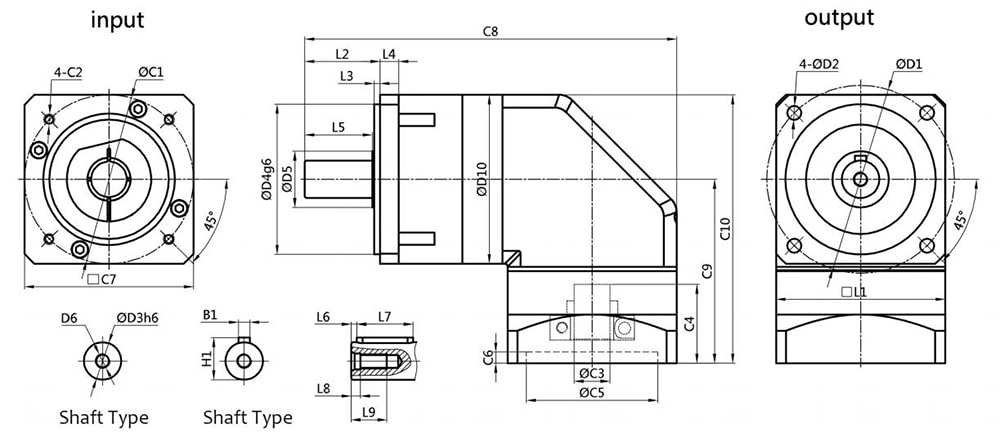
Parámetros del reductor planetario recto serie WPGR
| Size | WPGR060 | WPGR070 | WPGR080 | WPGR090 | WPGR115 | WPGR142 | WPGR215 | |
|---|---|---|---|---|---|---|---|---|
| D1 | 70 | 85 | 90 | 100 | 130 | 185 | 235 | |
| D2 | 5.5 | 5.5 | 6.5 | 6.5 | 9 | 11 | 13.5 | |
| D3h6 | 14 | 16 | 20 | 22 | 25 | 40 | 55 | |
| D4g6 | 50 | 50 | 70 | 80 | 110 | 130 | 180 | |
| D5 | 17 | 20 | 25 | 30 | 40 | 60 | 65 | |
| D6 | M5X0.8P | M5X0.8P | M6X1P | M8X1.25P | M10X1.5P | M12X1.75P | M20X2.5P | |
| D10 | 60 | 70 | 80 | 90 | 120 | 142 | 205 | |
| L1 | 60 | 75 | 90 | 90 | 120 | 142 | 215 | |
| L2 | 32 | 35 | 40 | 40 | 55 | 85 | 90 | |
| L3 | 3 | 5 | 3 | 3 | 4 | 5 | 6 | |
| L4 | 10 | 10 | 10 | 10 | 15 | 15 | 20 | |
| L5 | 28 | 28 | 36 | 36 | 50 | 80 | 82 | |
| L6 | 2 | 3 | 3 | 3 | 5 | 6 | 7.5 | |
| L7 | 25 | 25 | 30 | 30 | 40 | 55 | 70 | |
| L8 | 1 | 1 | 1 | 1 | 3 | 4 | 4 | |
| L9 | 10 | 10 | 12 | 12 | 23 | 30 | 30 | |
| C1* | 70 | 70 | 90 | 90 | 145 | 200 | 200 | |
| C2* | M5X0.8P | M5X0.8P | M6X1P | M6X1P | 8X1.25P | M12X1.75P | M12X1.75P | |
| C3* | 14 | 14 | 19≤C3≤22 | 19≤C3≤22 | 19≤C3≤24 | 22≤C3≤42 | 22≤C3≤42 | |
| C4* | 33 | 33 | 41 | 41 | 60 | 82.5 | 82.5 | |
| C5* | 50 | 50 | 70 | 70 | 110 | 114.3 | 114.3 | |
| C6* | 4 | 4 | 7 | 7 | 30 | 30 | 30 | |
| C7* | 60 | 60 | 90 | 90 | 130 | 180 | 180 | |
| C9* | 67 | 67 | __ | 98 | 132 | __ | __ | |
| C10* | 97 | 97 | __ | 143 | 192 | __ | __ | |
| B1 | 5 | 5 | 6 | 6 | 8 | 42 | 16 | |
| H1 | 16 | 18 | 22.5 | 24.5 | 28 | 43 | 59 | |
| C8* | L1 | 135 | 141.5 | __ | 198 | 266 | __ | __ |
| L2 | 151.5 | 167 | __ | 223 | 298 | __ | __ | |
| Size | Stage | Ratios | WPGR060 | WPGR070 | WPGR080 | WPGR090 | WPGR115 | WPGR142 | WPGR215 |
|---|---|---|---|---|---|---|---|---|---|
| Rated output torque(Nm) |
L1 | 3 | 18 | 22 | 40 | 75 | 120 | 400 | 1050 |
| 4 | 40 | 45 | 110 | 85 | 215 | 800 | 1780 | ||
| 5 | 36 | 41 | 90 | 100 | 230 | 700 | 1600 | ||
| 7 | 25 | 26 | 50 | 80 | 160 | 550 | 1000 | ||
| 10 | 15 | 15 | 22 | 50 | 110 | 210 | 305 | ||
| L2 | 12 | 20 | 45 | 110 | 75 | 120 | 800 | 1780 | |
| 15 | 20 | 41 | 90 | 75 | 120 | 700 | 1600 | ||
| 20 | 31 | 45 | 110 | 85 | 215 | 800 | 1000 | ||
| 25 | 39 | 41 | 90 | 100 | 230 | 700 | 1780 | ||
| 30 | 20 | 41 | 90 | 75 | 120 | 700 | 1600 | ||
| 35 | 39 | - | 55 | 100 | 230 | 550 | 1600 | ||
| 40 | 31 | 41 | 90 | 85 | 215 | 700 | 1600 | ||
| 50 | 39 | 25 | 50 | 100 | 230 | 450 | 700 | ||
| 70 | 25 | — | — | 80 | 160 | - | - | ||
| 100 | 15 | 40 | 110 | 50 | 110 | 800 | 1780 | ||
| Max instantaneous output torque(N.m) | L1,L2 | 3~100 | 2.0 times Rated output torque | ||||||
| Return backlash(arcmin) | L1 | 3~10 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 |
| L2 | 12~100 | ≤15 | ≤15 | ≤15 | ≤15 | ≤15 | ≤15 | ≤15 | |
| Rated input speed(rpm) | L1,L2 | 3~100 | 4000 | 4000 | 3500 | 3500 | 3500 | 3000 | 2500 |
| Max input speed(rpm) | L1,L2 | 3~100 | 8000 | 8000 | 6000 | 6000 | 6000 | 4500 | 4000 |
| Torsional stiffness(Nm/arcmin) | L1,L2 | 3~100 | 1.8 | 1.95 | 4.7 | 4.85 | 11 | 35 | 55 |
| Allowable Radial Load(N) | L1,L2 | 3~100 | 240 | 265 | 400 | 450 | 120 | 3700 | 4800 |
| Allowable axial load(N) | L1,L2 | 3~100 | 220 | 230 | 420 | 430 | 1000 | 3500 | 4500 |
| Noise(dB/1m) | L1,L2 | 3~100 | 56 | 58 | 60 | 63 | 68 | 70 | 70 |
| Life(hrs) | L1,L2 | 3~100 | 20,000 | ||||||
| Efficiency at full load(%) | L1 | 3~10 | ≥97% | ||||||
| L2 | 12~100 | ≥94% | |||||||
| Temperature(°C) | L1,L2 | 3~10 | -10℃~+90℃ | ||||||
| Degree of protection | L1,L2 | 3~100 | IP65 | ||||||
| Grease | L1,L2 | 3~100 | Fully Synthetic Grease | ||||||
| Transmission inertia of reducer | |||||||||
| Size | Stage | Ratios | WPGR060 | WPGR070 | WPGR080 | WPGR090 | WPGR115 | WPGR142 | WPGR215 |
| Moment of inertia(kg.cm) | L1 | 3 | 0.135 | 0.135 | 0.77 | 0.77 | 2.63 | 5.83 | 251.6 |
| 4 | 0.093 | 0.093 | 0.52 | 0.52 | 1.79 | 3.21 | 243 | ||
| 5 | 0.078 | 0.078 | 0.45 | 0.45 | 1.53 | 3.1 | 232.8 | ||
| 7 | 0.065 | 0.065 | 0.39 | 0.39 | 1.3 | 2.1 | 205.8 | ||
| 10 | 0.063 | 0.063 | 0.39 | 0.39 | 1.28 | 1.95 | |||
| L2 | 12 | 0.11 | - | 0.37 | 0.37 | 3.27 | - | ||
| 15 | 0.039 | 0.039 | 0.72 | 0.72 | 2.4 | 3.35 | 55.3 | ||
| 20 | 0.049 | 0.049 | 0.35 | 0.35 | 1.06 | 2.73 | 52.1 | ||
| 25 | 0.039 | 0.039 | 0.25 | 0.25 | 1.4 | 2.25 | 50.09 | ||
| 30 | 0.038 | 0.038 | 0.18 | 0.18 | 1.4 | 2.25 | 50.09 | ||
| 35 | 0.09 | - | 0.35 | 0.35 | - | - | - | ||
| 40 | 0.27 | 0.027 | 0.18 | 0.18 | 1.3 | 2.25 | - | ||
| 50 | 0.09 | - | 0.35 | 0.35 | 3.04 | - | - | ||
| 70 | 0.09 | - | 0.35 | 0.35 | 3.04 | - | - | ||
| 100 | 0.016 | 0.016 | 0.25 | 0.25 | 1.35 | 2.15 | - | ||
Industria de aplicaciones
Adecuado para una amplia gama de aplicaciones
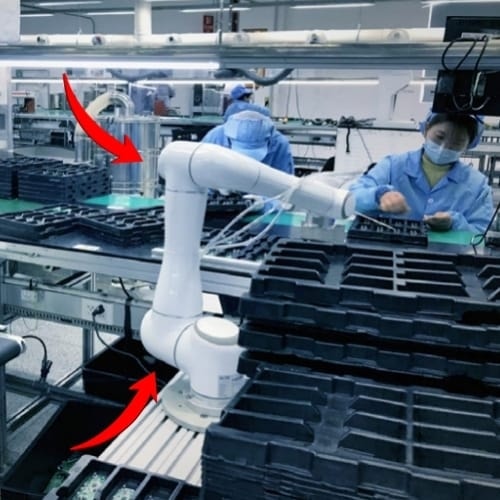
Robot cooperativo
Máquina multiarticular

Máquina de corte por láser
Máquina herramienta, Rectificadoras

MANIPULADOR PARALELO
Robots Scara, mano de araña...
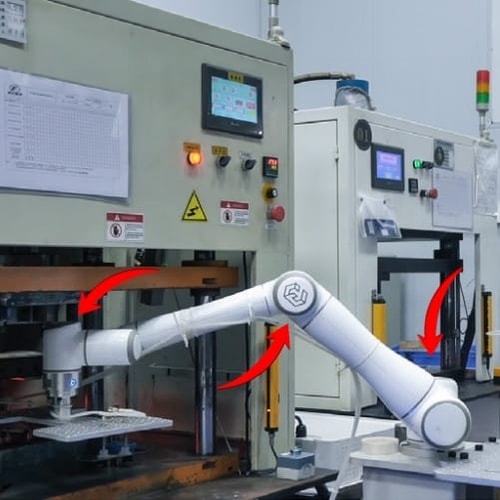
ROBOT INDUSTRIAL
Manipulador, robot de eje, etc.

ROBOT HUMANOIDE
Robot biónico, robots andantes.
AGV CAE
Coche AGV para logística de almacén
HERRAMIENTA DE MÁQUINA
Máquina dobladora de tubos...
Máquina de tallado CNC
Tallado e impresión de dentaduras postizas.

ROBOTS EXTERNOS
rehabilitación de peso..
Fábricas de Fubao Mechanic Tech












Ahora la oferta