 Español
Español Deutsch
Deutsch Русский
Русский English
English







En robótica industrial, existen varios tipos de reductores comúnmente utilizados:
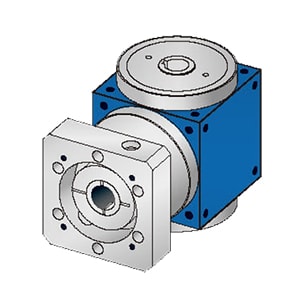
1. Reductor RV
El mecanismo reductor RV es un novedoso mecanismo de transmisión basado en el tradicional engranaje de piñón de rueda planetaria giratoria. Se aplica ampliamente en las articulaciones de robots industriales debido a su alta eficiencia. La potencia del servomotor en los robots industriales se transmite a través de engranajes en el eje de entrada del reductor, lo que resulta en una reducción de la velocidad. La relación de dientes y engranajes determina el porcentaje de eficiencia de la transmisión.

2. Reductor Armónico
Elreductor armónico es un nuevo mecanismo de transición en el sistema de engranajes y se utiliza normalmente en Robots industriales con cargas mínimas. Consiste en generadores de engranajes de ruedas elásticos y rígidos, que ofrecen una utilidad ligeramente mayor que los sistemas de ruedas flexibles. El reductor armónico presenta importantes ventajas de conducción, como tamaño compacto, menos componentes, un rango de motor único de 50-4000% y una eficiencia de transmisión de 92-96%.

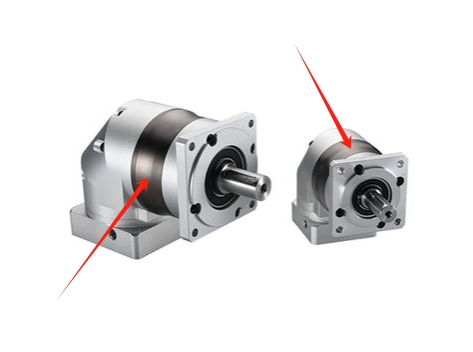
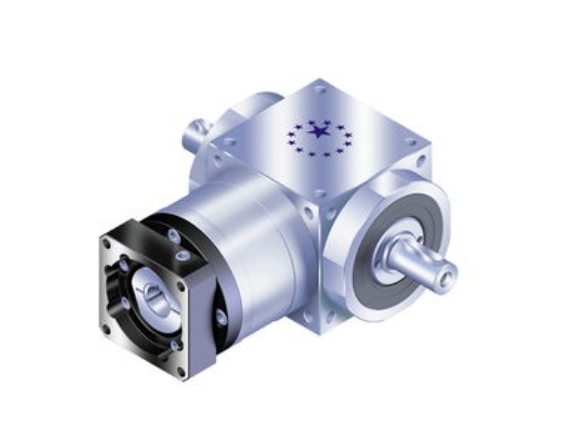
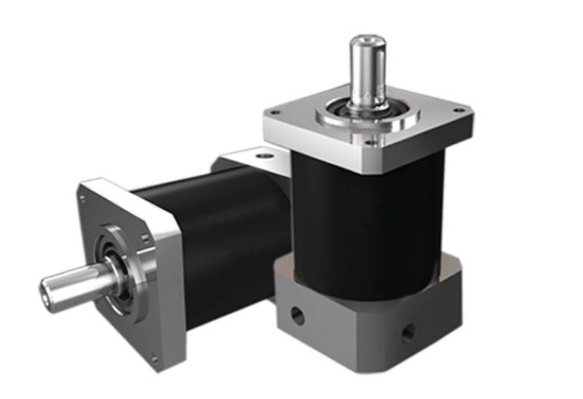
3. Reductor Planetario
En términos simples, los planetas en el reductor planetario < /a>giran alrededor del sol, al igual que los planetas de nuestro sistema solar. El reductor planetario, también conocido como sistema de engranajes planetarios, funciona como un reductor para reducir la velocidad de rotación del motor, aumentando así el par en los robots industriales.
El principio de funcionamiento del reductor planetario implica engranajes reductores. Cuando el sol gira bajo la fuerza motriz, el acoplamiento de las ruedas planetarias hace que giren. Simultáneamente, el otro lado de las ruedas planetarias trabaja junto con el anillo interno y los engranajes circulares en la pared interior de la carcasa, lo que permite que las ruedas planetarias giren en la misma dirección que el marco impulsor a lo largo de la dirección de rotación de la rueda planetaria. dentro de la fuerza motriz. Esto crea un movimiento de revolución del anillo interno y de los engranajes circulares. La rueda que gira alrededor del sol representa una revolución.
Los robots industriales suelen utilizar reductores RV, reductores armónicos y reductores planetarios. Los reductores RV ofrecen un control de velocidad adecuado para servomotores, reduciendo la velocidad al nivel deseado para cada componente del robot industrial mientras aumentan el par generado.





Ahora la oferta