 Español
Español Deutsch
Deutsch Русский
Русский English
English











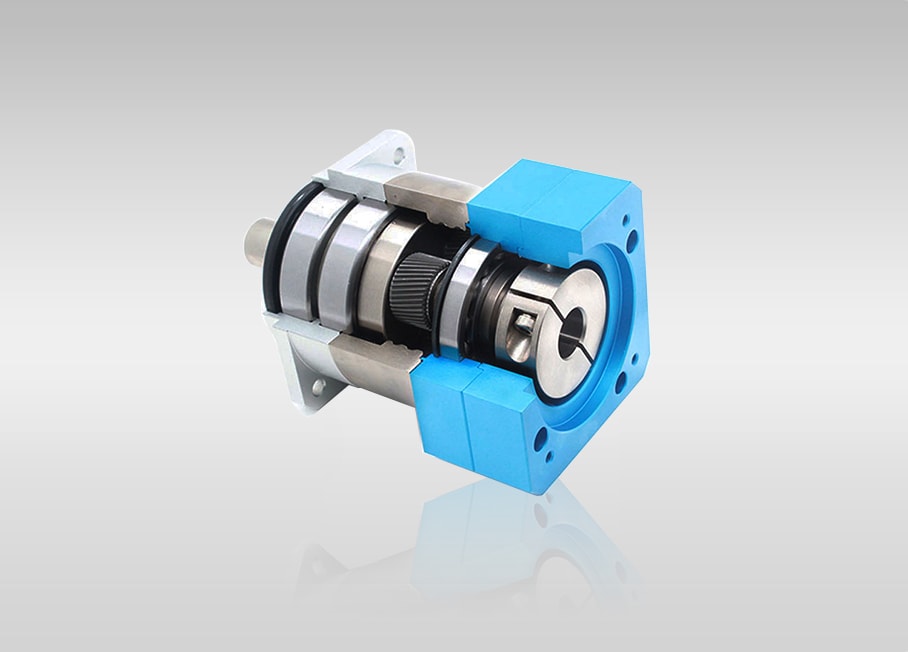
Características del reductor planetario serie WABR
La caja de cambios está hecha de acero de aleación de alta calidad, que ha sido tratada con nitruración de carbono para obtener la mejor resistencia al desgaste y tenacidad al impacto. El análisis de elementos finitos de la resistencia de la caja de cambios se lleva a cabo utilizando tecnología ANSYS, y al mismo tiempo se recortan la forma de la superficie del diente y el avance para reducir el impacto y el ruido del engrane de la caja de cambios y aumentar la vida útil del tren de engranajes.
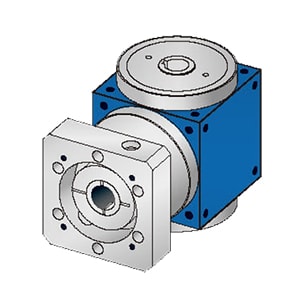
El portasatélites de salida adopta un diseño de estructura integrada (doble soporte), y los cojinetes delanteros y traseros están distribuidos en la caja con una gran envergadura para formar una estructura integrada estable para garantizar una alta rigidez y precisión torsional.
La caja de engranajes de anillo y la carcasa de salida adoptan un diseño integrado, fabricado en acero de alta calidad y formado mediante forjado en caliente para obtener una alta densidad del material.
El diseño integrado puede garantizar que todas las dimensiones geométricas se procesen al mismo tiempo y tiene mayor precisión y resistencia en comparación con otras estructuras integradas y con clip. El eje de entrada y el dispositivo de bloqueo adoptan un diseño integrado y los pernos dobles están distribuidos simétricamente para lograr un equilibrio dinámico.
Al mismo tiempo, el fuerte bloqueo de los pernos dobles evita eficazmente que el eje eléctrico se deslice y logra una transmisión de potencia de alta precisión y bajo juego.
La caja de cambios está hecha de acero de aleación de alta calidad, que ha sido tratada con nitruración de carbono para obtener la mejor resistencia al desgaste y tenacidad al impacto. El análisis de elementos finitos de la resistencia de la caja de cambios se lleva a cabo utilizando tecnología ANSYS, y al mismo tiempo se recortan la forma de la superficie del diente y el avance para reducir el impacto y el ruido del engrane de la caja de cambios y aumentar la vida útil del tren de engranajes.
El portasatélites de salida adopta un diseño de estructura integrada (doble soporte), y los cojinetes delanteros y traseros están distribuidos en la caja con una gran envergadura para formar una estructura integrada estable para garantizar una alta rigidez y precisión torsional.
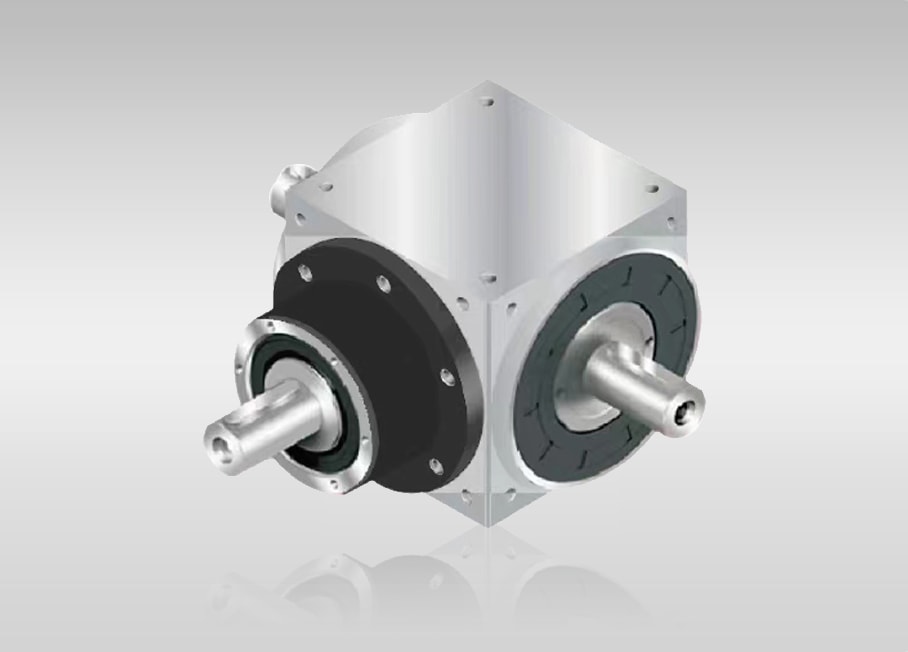
Dibujos del reductor planetario serie WABR
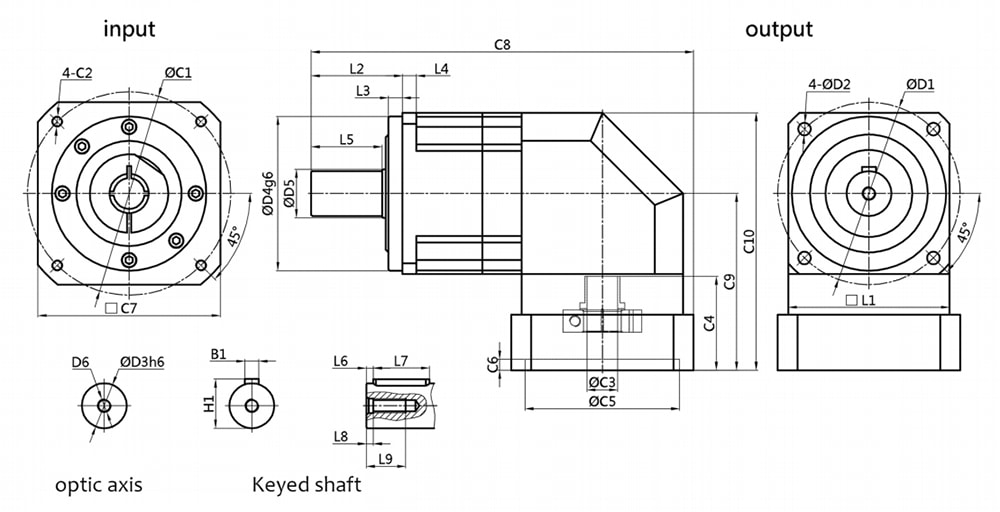
Parámetros del reductor planetario serie WABR
| Size | WABR042 | WABR060 | WABR090 | WABR115 | WABR142 | WABR180 | WABR220 | |
|---|---|---|---|---|---|---|---|---|
| D1 | 50 | 70 | 100 | 130 | 165 | 215 | 250 | |
| D2 | 3.4 | 5.5 | 6.5 | 9 | 10.5 | 13 | 17 | |
| D3h6 | 13 | 16 | 22 | 32 | 40 | 55 | 75 | |
| D4g6 | 35 | 50 | 80 | 110 | 130 | 160 | 180 | |
| D5 | 16.5 | 24.5 | 34.5 | 34.5 | 48 | 65 | 95 | |
| D6 | M4X0.7P | M5X0.8P | M8X1.25P | M12X1.75P | M16X2P | M20X2.5P | M20X2.5P | |
| L1 | 42.6 | 60 | 90 | 115 | 142 | 180 | 220 | |
| L2 | 26 | 37 | 48 | 65 | 97 | 105 | 138 | |
| L3 | 5 | 7 | 10 | 12 | 15 | 20 | 30 | |
| L4 | 5 | 8 | 10 | 10 | 18 | 15 | 20 | |
| L5 | 20 | 28.5 | 35.5 | 51 | 79 | 82 | 105 | |
| L6 | 2 | 3 | 3 | 5 | 5 | 6 | 7 | |
| L7 | 16 | 20 | 30 | 40 | 63 | 70 | 90 | |
| L8 | 4.5 | 4.8 | 7.2 | 10 | 12 | 15 | 15 | |
| L9 | 10 | 12.5 | 19 | 28 | 36 | 42 | 42 | |
| C1* | 46 | 70 | 90 | 145 | 200 | 200 | 200 | |
| C2* | M4X0.7P | M5X0.8P | M6X1P | M8X1.25P | M12X1.75P | M12X1.75P | M12X1.75P | |
| C3* | 8 | 14 | 19≤C3≤22 | 19≤C3≤24 | 22≤C3≤42 | 22≤C3≤42 | 22≤C3≤42 | |
| C4* | 27 | 32.5 | 47 | 67 | 82 | 118 | 119 | |
| C5* | 30 | 50 | 70 | 110 | 114.3 | 114.3 | 114.3 | |
| C6* | 5 | 5 | 5 | 10 | 10 | 10 | 10 | |
| C7* | 42.6 | 60 | 90 | 130 | 180 | 180 | 220 | |
| C9* | 53.25 | 68 | 97 | 126 | 150 | 205.5 | 224 | |
| C10* | 74.5 | 98 | 142 | 183.5 | 221 | 276.5 | 334 | |
| B1 | 5 | 5 | 6 | 10 | 12 | 16 | 20 | |
| H1 | 15 | 18 | 24.5 | 35 | 43 | 59 | 79.5 | |
| C8* | L1 | 108 | 146.5 | 200.5 | 265 | 356 | 387.5 | 494.5 |
| L2 | 128 | 166.5 | 228.5 | 302 | 420 | 446 | 510 | |
| Size | Stage | Ratios | WABR042 | WABR060 | WABR090 | WABR115 | WABR142 | WABR180 | WABR220 |
|---|---|---|---|---|---|---|---|---|---|
| Rated output torque(Nm) | L1 | 3 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 |
| 4 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | ||
| 5 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 6 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 7 | 14 | 44 | 125 | 270 | 450 | 960 | 1500 | ||
| 8 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | ||
| 9 | 11 | 37 | 95 | 220 | 360 | 950 | 1550 | ||
| 10 | 11 | 37 | 95 | 220 | 360 | 1050 | 1700 | ||
| 14 | 14 | 44 | 125 | 271 | 450 | 960 | 1500 | ||
| 18 | 11 | 37 | 95 | 220 | 360 | 800 | 1250 | ||
| 20 | 11 | 37 | 95 | 220 | 360 | 800 | 1250 | ||
| 12 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 15 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 20 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | ||
| 25 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 30 | 19 | 53 | 145 | 290 | 520 | 950 | 1550 | ||
| 35 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| L2 | 40 | 20 | 55 | 150 | 300 | 550 | 1000 | 1650 | |
| 45 | 17 | 54 | 140 | 290 | 630 | —— | —— | ||
| 50 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 70 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| 90 | 17 | 54 | 140 | 290 | 530 | — | — | ||
| 100 | 17 | 54 | 140 | 290 | 530 | 1050 | 1700 | ||
| Max instantaneous output torque(Nm) | L1, L2 | 3 times rated output torque | |||||||
| Return backlashP0(arcmin) | L1 | 3~10 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 |
| L2 | 12~100 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | ≤8 | |
| Return backlashP1(arcmin) | L1 | 3~10 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 |
| L2 | 12~100 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | ≤10 | |
| Return backlashP2(arcmin) | L1 | 3~10 | ≤9 | ≤9 | ≤9 | ≤9 | ≤9 | ≤9 | ≤9 |
| L2 | 12~100 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | ≤12 | |
| Rated input speed(rpm) | L1, L2 | 3~100 | 5000 | 3000 | 3000 | 3000 | 3000 | 1500 | 1500 |
| Max input speed(rpm) | L1, L2 | 3~100 | 10000 | 6000 | 6000 | 6000 | 6000 | 3000 | 3000 |
| Torsional stiffness(Nm/arcmin) | L1, L2 | 3~100 | 2.5 | 6 | 12 | 23 | 45 | 148 | 220 |
| Allowable radial Load(N) | L1, L2 | 3~100 | 515 | 1010 | 1780 | 3420 | 5380 | 8330 | 11120 |
| Allowable axial load(N) | L1, L2 | 3~100 | 410 | 600 | 1500 | 2650 | 4670 | 6460 | 8560 |
| Noise(dB) | L1, L2 | 3~100 | 62 | 63 | 65 | 70 | 70 | 73 | 75 |
| Life(hrs) | L1, L2 | 3~100 | 20,000(10,000 continue operating) | ||||||
| Efficiency at full load(%) | L1 | 3~10 | ≥97% | ||||||
| L2 | 12~100 | ≥94% | |||||||
| Temperature(°c) | L1, L2 | 3~10 | -10℃~+90℃ | ||||||
| Weight(KG) | L1 | 3~10 | 1 | 1.3 | 3.5 | 7.8 | 16.1 | 30 | 58 |
| L2 | 12~100 | 1.4 | 2 | 5.6 | 9.5 | 19 | 42 | 67 | |
| Degree of protection | L1, L2 | 3~100 | IP65 | ||||||
| Grease | L1, L2 | 3~100 | Fully Synthetic Grease | ||||||
| Transmission inertia of reducer | |||||||||
| Size | Stage | Ratios | WABR042 | WABR060 | WABR090 | WABR115 | WABR142 | WABR180 | WABR220 |
| Moment of inertia(kg.cm) | 3 | 0.06 | 0.23 | 0.98 | 2.36 | 10.1 | 31 | 79.63 | |
| 4 | 0.06 | 0.18 | 0.68 | 1.68 | 7.3 | 26 | 59.3 | ||
| L1 | 5 | 0.06 | 0.17 | 0.66 | 1.55 | 6.58 | 23.8 | 54.86 | |
| 6/7/8 | 0.06 | 0.15 | 0.6 | 1.48 | 6.22 | 23 | 54.32 | ||
| 9/10/14/18/20 | 0.06 | 0.14 | 0.58 | 1.45 | 6.15 | 22.9 | 54 | ||
| 12/15/18/20 | 0.05 | 0.18 | 0.68 | 2.4 | 6.52 | 24.27 | 54.37 | ||
| L2 | 30/35/40 | 0.05 | 0.15 | 0.68 | 1.68 | 6.52 | 23.82 | 54.37 | |
| 45/50/70 | 0.05 | 0.15 | 0.6 | 1.51 | 6.21 | 22.94 | 53.3 | ||
| 80/90/100 | 0.05 | 0.14 | 0.6 | 1.41 | 6.1 | 22.75 | 52.45 | ||
Industria de aplicaciones
Adecuado para una amplia gama de aplicaciones
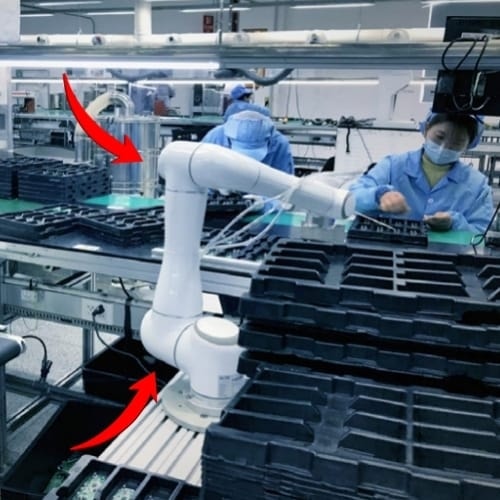
Robot cooperativo
Máquina multiarticular

Máquina de corte por láser
Máquina herramienta, Rectificadoras

MANIPULADOR PARALELO
Robots Scara, mano de araña...
ROBOT INDUSTRIAL
Manipulador, robot de eje, etc.

ROBOT HUMANOIDE
Robot biónico, robots andantes.
AGV CAE
Coche AGV para logística de almacén
HERRAMIENTA DE MÁQUINA
Máquina dobladora de tubos...
Máquina de tallado CNC
Tallado e impresión de dentaduras postizas.

ROBOTS EXTERNOS
rehabilitación de peso..
Fábricas de Fubao Mechanic Tech












Ahora la oferta