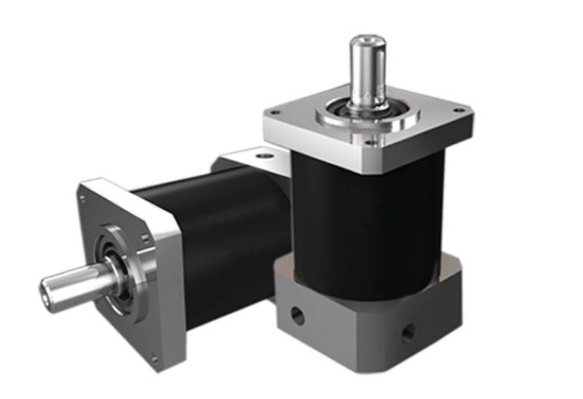
En algunos documentos técnicos o documentos de comunicación del reductor de servo planetario, a menudo vemos términos profesionales como la relación de reducción, el par de salida nominal, la velocidad, la brecha lateral y otros. Para algunos amigos que no están familiarizados con el reductor de velocidad, esto puede ser confuso. Para resolver las dudas de estos amigos, el fabricante de reductores de velocidad, Fubo Technology Frontier, explicará el significado y la función de estos términos profesionales.
a) Disminución de la velocidad
La relación de desaceleración es la relación entre el par y la velocidad entre la fuerza de entrada y la fuerza de salida del reductor servo planetario, donde el par es proporcional y la velocidad es inversamente proporcional. La relación de desaceleración carga el trabajo de reducir la inercia del mecanismo, de modo que el mismo motor puede conducir el mecanismo con mayor inercia.
2.- Reacciones violentas
La brecha de dientes también se conoce como la brecha de dientes y la brecha de retorno. El espacio lateral es uno de los signos de precisión del reductor de servo planetario, generalmente expresado en minutos de arco o minutos angulares (un minuto de arco es igual a 1/60 de 1 grado). Se refiere al ángulo en el que el reductor puede girar cuando la caja de engranajes se fija en el extremo de entrada, es decir, el valor de la brecha entre los grupos de engranajes. Si el mecanismo en sí es ligero y no hay demanda inversa, la brecha lateral se puede ignorar; En aplicaciones de precisión como la robótica, la automatización o el CNC que requieren la inversión, la brecha trasera es importante para la precisión y el posicionamiento.
c) Torque de salida nominal
El par de salida es un parámetro importante para la selección de un reductor de servo planetario. La relación de desaceleración del motor puede proporcionar un mayor par de salida, pero el conjunto de engranajes todavía tiene un límite de resistencia. Por lo tanto, cuando la relación es demasiado grande, el engranaje del reductor tiene dudas de sobrecarga. En este punto, los productos de pedidos más grandes deben considerarse por el par de salida nominal.
4.- Velocidad angular
La velocidad de salida del producto es inversamente proporcional a la relación de transmisión. Después de pasar por el grupo de engranajes de reducción, la alta velocidad del motor se convertirá en una velocidad más baja, que luego se emitirá por la salida del reductor, que es la función básica del reductor.
5.- Fuerza radial axial
La vida útil de los reductores servo-planetarios es generalmente de 20.000 horas, y la vida útil del producto depende de los rodamientos utilizados. Cuando la velocidad del rodamiento es alta y la tensión es grande, la vida útil del producto se acortará. Sobre la base de la velocidad de salida de 100 rpm, se calcula la capacidad máxima de tensión para la vida útil del rodamiento de 20.000 horas, que es la fuerza radial axial permitida especificada por los parámetros del reductor.
6.- Inversión de la rigidez
El reductor de servo-planetario, aunque rígido, se deforma cuando se ve afectado por la fuerza. Por lo tanto, los fabricantes de reductores proporcionarán el valor de torque requerido para 1 minuto de arco (1/60 grados) por deformación para la referencia del usuario.
7.- Inercia de rotación
Aunque el reductor servo-planetario puede reducir el inercia en el extremo mecánico y la carga en el extremo del motor, todavía tiene su propio inercia. Además, cuando la concéntrica del producto es pobre y el grupo de engranajes interfiere, se producirá un exceso de inercia. Por lo tanto, los fabricantes de reductores generalmente proporcionarán el momento de inercia máximo del producto para la referencia del usuario.
 Español
Español Deutsch
Deutsch Русский
Русский English
English











Ahora la oferta